Van Simulasie tot Werklikheid: ’n Evaluering van die Doeltreffendheid van Pure Pursuit, MPC en MPCC op die F1Tenth-platform
- Oorbrug die sim-na-werklikheid-gaping: Algoritmes wat in simulasie uitblink, het in die werklike wêreld gesukkel weens lokaliseringsfoute.
- Pure Pursuit-algoritme was meer robuust: Die algoritme het mooi glad na die werklike voertuig oorgeskakel, terwyl MPC verdere verfyning vereis het. Hoewel MPCC die vinnigste was in simulasie, het dit in die praktyk misluk.
- Verbeteringe wat die werklike werkverrigting verhoog het: Kalman-filtrering, vertragingkompensasie en aanpasbare stuurbeheer het MPC gestabiliseer, maar MPCC het steeds beperk gebly weens aanboordrekenaarkapasiteit.
Simulasie dien as die primêre toetsgrond waar outonome algoritmes vorm aanneem. Tog bestaan daar ’n beduidende gaping tussen ’n perfekte digitale omgewing en die fisiese wette van die werklikheid — ’n verskynsel wat bekend staan as die “sim-na-werklikheid”-gaping.
Hierdie ingenieursuitdaging vorm die kern van Xiangyiming Kong se navorsing, wat die F1Tenth-renplatform gebruik het om die grense van moderne beheeralgoritmes te toets.
Die Mededingers: Drie Benaderings tot Beheer
Die studie het drie onderskeibare beheeralgoritmes ondersoek, gekies vir hul verskillende vlakke van berekeningskompleksiteit en teoretiese gesofistikeerdheid:
- Pure Pursuit: Die eenvoudigste van die drie. Hierdie geometriese roetenasporingsalgoritme bereken ’n stuurhoek gebaseer op ’n “teikenpunt” op ’n vaste afstand voor die voertuig. Dit bly berekeningsdoeltreffend en stabiel, en funksioneer soortgelyk aan ’n bestuurder wat ’n paar meter vorentoe kyk om die stuurwiel aan te pas.
- Model Predictive Control (MPC): ’n Meer gesofistikeerde, optimaliseringsgebaseerde algoritme. MPC gebruik ’n dinamiese model van die voertuig om toekomstige toestande oor ’n beperkte tydshorison te voorspel. Dit los by elke tydstap ’n optimaliseringsprobleem op om nasporingsfoute en beheerpoging te minimaliseer, en beplan effektief vooruit om veiligheid en doeltreffendheid te balanseer.
- Model Predictive Contouring Control (MPCC): Die mees komplekse van die drie. Anders as standaard MPC, wat streng ’n voorafbepaalde roete volg, kombineer MPCC voorspellende modellering met kontureringsdoelwitte. Dit balanseer die afruil tussen roete-akkuraatheid en vordering, wat die voertuig toelaat om effens van die middellyn af te wyk indien dit hoër spoed deur ’n draai moontlik maak — soortgelyk aan ’n professionele renjaer wat die vinnigste lyn vind.
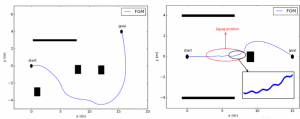
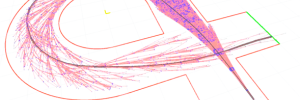
Fig 1: Visuele voorstelling van die probleme wat deur die Follow the Gap-algoritme ondervind word.
Die Simulasiefase: Teorie vs. Fisika
In die beheerde omgewing van die F1Tenth Gym-simulator is hierdie algoritmes aan geraas- en vertragingsteurings onderwerp om realistiese uitdagings na te boots. Die resultate het duidelike prestasie-eienskappe getoon. MPCC was die vinnigste en het die beste rondtetye gelewer deur sy spoedprofiel dinamies te optimaliseer om teen die grens van die bande se wrywing te jaag.
MPC het ’n gebalanseerde prestasie gelewer deur verwysingsnelhede en trajekte effektief te volg. Pure Pursuit het uitgeblink in eenvoud en stabiliteit op bane met minimale krommingsveranderinge, maar het gesukkel op meer komplekse roetes met skerp draaie.
Die Werklikheidstoets: Wanneer Algoritmes die Teerpad Tref
Die ware toets het plaasgevind toe die span die algoritmes op die fisiese F1Tenth RC-voertuig geïmplementeer het. Die oorgang het die harde werklikheid van die sim-na-werklikheid-gaping blootgelê. Hoewel Pure Pursuit relatief goed aangepas het weens sy eenvoud, het die optimaliseringsgebaseerde algoritmes (MPC en MPCC) aanvanklik misluk om ’n rondte teen teikenspoed te voltooi.
Die ondersoek het getoon dat die hoofprobleem nie die voertuig se dinamiese model was nie, maar lokaliseringsonnoukeurigheid. Die fisiese voertuig maak staat op ’n deeltjiefilter en LiDAR-data om sy posisie te beraam. In kenmerklose omgewings, soos ’n lang, gladde gang, het die deeltjiefilter gesukkel om duidelike landmerke te identifiseer, wat gelei het tot posisieberamings wat vertraag of onstabiel was.
Vir algoritmes soos MPC en MPCC, wat staatmaak op presiese aanvanklike posisiedata om toekomstige toestande te voorspel, was hierdie foute katastrofies en het dit tot ossillasie en botsings gelei.
Die Oplossing: ’n Drieledige Benadering
Om die gaping te oorbrug, het die navorsing ’n saamgestelde oplossing voorgestel om data te verfyn voordat die beheeralgoritmes dit verwerk:
- Kalman-filter-afvlakking: ’n Uitgebreide Kalman-filter (EKF) is geïmplementeer om Gaussiese geraas uit lokaliseringsmetings te filter en ’n gladder trajek vir die beheerder te verskaf.
- Intydse vertragingkompensasie: Die stelsel het ’n gemiddelde latensie van 226 ms tussen die voertuig se werklike posisie en die beraamde posisie gemeet. ’n Kompensasiemetode het die werklike ligging voorspel en die vertraagde data effektief na die huidige oomblik “vooruitgespoel”.
- Aanpasbare stuurbeheer: Om ossillasie op reguit dele te beperk, is ’n aanpasbare stuurgewig by die kostefunksie gevoeg. Dit penaliseer vinnige stuurveranderings op reguit paaie, terwyl aggressiewe stuur in draaie toegelaat word.
Die Uitspraak
Die implementering van hierdie oplossing het beduidende verbeterings opgelewer. Die MPC-algoritme, wat voorheen in die werklike wêreld misluk het, het ’n gladde en stabiele trajek teen snelhede tot 2 m/s gelewer. Pure Pursuit se prestasie is ook verbeter.
Die studie het egter ’n kritieke hardewarebeperking vir MPCC uitgelig. Hoewel MPCC goed in simulasie gevaar het, het dit in die praktyk misluk, selfs met die voorgestelde verbeterings.
Die oorsaak was berekeningsbeperkings: die voertuig se aanboordrekenaar (Nvidia Jetson Xavier NX) kon MPCC-beheeropdragte slegs teen gemiddeld 3 Hz opdateer, teenoor 19 Hz vir die ander algoritmes. Teen 1 m/s beteken ’n 3 Hz-opdateringsfrekwensie dat die voertuig 0,33 meter tussen besluite beweeg — ’n afstand te groot vir hoëspoedrenne.
Slotgedagtes
Hierdie navorsing beklemtoon dat die oorbrugging van die sim-na-werklikheid-gaping nie net oor beter kode gaan nie, maar ook oor die bestuur van sensoronvolmaakthede en hardewarebeperkings. Die studie het suksesvol getoon dat deur robuuste toestandberaming (Kalman-filtrering) met vertragingkompensasie te kombineer, gesofistikeerde algoritmes soos MPC suksesvol na kleinskaalse outonome platforms oorgedra kan word.
Toekomstige werk sal moet fokus op berekeningsoptimalisering of kragtiger hardeware om die volle potensiaal van MPCC in die fisiese wêreld te ontsluit.
Laai die volledige navorsingsartikel af en lees dit hier: https://scholar.sun.ac.za/items/a9c1084b-d0fa-47a3-9229-928d6153fac7
Verwante stories
Ingenieurswese en tegnologie
Van Radarweerkaatsings Na Beelde: Die Rekonstruksie Van Roterende Tonele Met ISAR
Radar kan meet hoe ver ’n voorwerp weg is en of dit beweeg, maar verskeie bykomende verwerkingstappe is nodig om ’n gedetailleerde beeld uit weerkaatste...
Ingenieurswese en tegnologie
Vergelyking van twee radio-voortplantingsmodelle vir ontvangsvlak-afwykings by die SKA
By die Square Kilometre Array-terrein (SKA) in die Noord-Kaap is die betroubaarheid en akkuraatheid van radiokommunikasie van kritieke belang. Die spanne wat...

Ingenieurswese en tegnologie
Van Teikenimpak Na Onmiddellike Draadlose Terugvoer
In langafstandpresisieskiet raak dit moeiliker om ’n teikenimpak te bevestig namate die afstand toeneem. Teleskope, kameras en klankgebaseerde bevestiging kan...