Q-Bert: Loopvermoë vir ’n Tweevoetige Robot
- Die blog beskryf hoe ’n Stellenbosch Universiteit-student ’n bekostigbare tweevoetige robot, Q-Bert, ontwikkel het om stabiel te kan loop. In plaas van duur tegnologie, fokus die navorsing op slim algoritmes en beheerstelsels om betroubare beweging te bereik.
- Deur ’n geoptimaliseerde looptrajek en ’n dubbelvlak-beheerstelsel te gebruik, kon Q-Bert suksesvol verskeie treë neem met hoë akkuraatheid. Die resultate wys dat gevorderde robotika nie noodwendig duur toerusting vereis nie.
- Hierdie werk maak robotikanavorsing meer toeganklik en skep ’n grondslag vir verdere ontwikkeling, soos groter outonomie en meer gevorderde bewegings.
Stap is natuurlik vir mense, maar vir robotte bly dit een van die moeilikste ingenieursuitdagings. Robotte met bene het komplekse, nie-lineêre dinamika wat stabiele beweging moeilik maak. Die mees gevorderde platforms, soos dié wat by toonaangewende navorsingsinstellings ontwikkel word, toon indrukwekkende behendigheid op ongelyke terrein—maar hulle is uiters duur en buite bereik vir baie universiteite en navorsingsgroepe.
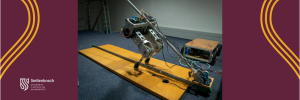
Hierdie kostebeperking het Jean Louis van der Walt, ’n meestersstudent in Elektriese en Elektroniese Ingenieurswese aan die Universiteit Stellenbosch, geïnspireer om ’n ander benadering in sy tesis te volg. In plaas daarvan om op duur stelsels staat te maak, het hy met Q-Bert gewerk, ’n tweevoetige robot met 10 vryheidsgrade (DoF) wat intern ontwerp is as ’n bekostigbare toetsplatform. Sy doel was om te bewys dat selfs eenvoudiger robotte betroubaar kan leer loop met die regte algoritmes en beheerstelsels.
Agtergrond tot die Navorsing
Van der Walt begin deur twee kernuitdagings van been-gebaseerde beweging te beskryf: die modellering van diskrete kontak tussen voet en grond, en die generering van stabiliserende beheerkoppelkragte vinnig genoeg vir intydse toepassing. Sy navorsing het op twee hoofareas gefokus:
Generering van looptrajekte: Deur wiskundige modellering en optimaliseringsmetodes te gebruik, het hy ’n verwysings-loopgang vir Q-Bert ontwikkel. Hierdie trajek het rekening gehou met gewrigsbeweging, grondkontak en die fisiese beperkings van die robot.
Ontwerp van ’n dubbelvlak-beheerstelsel: ’n Hoëvlak modelvoorspellende beheerder (MPC) het intyds die verlangde motorkoppelkragte bereken, terwyl ’n laevlak proporsionele beheerder die seine verfyn het om gladde beweging te verseker. Saam het hierdie beheerders Q-Bert in staat gestel om die geoptimaliseerde loopgang te volg.
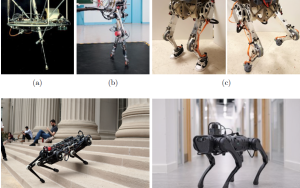
Voorbeelde van die drie hoofkategorieë been-robotte (eenvoetig, tweevoetig en viervoetig) wat in die industrie of navorsing ontwikkel is, sluit in: Raibert se Hopper (a), RABBIT (b), Little Hermes (c), MIT Cheetah 3 (d) en Unitree A1 (e).
Sleutelresultate
Na maande van modellering, programmering en verfyning het Jean Q-Bert in die laboratorium getoets. Die robot kon 10 suksesvolle treë neem, vyf met elke been, en het ’n gemiddelde afstand van 1.06 meter afgelê. Oor vier gewrigstrajekte het Q-Bert ’n gemiddelde volgakkuraatheid van meer as 91% behaal, met ’n klein foutmarge van 8.65%.
Vir ’n robot met vereenvoudigde meganika is hierdie resultate betekenisvol. Dit wys dat stabiele loopbewegings moontlik is sonder duur platforms, mits gevorderde beheerstegnieke en noukeurige optimalisering gebruik word. Omdat die loopgang periodiek is, kan Q-Bert se beweging onbeperk voortgesit word, wat langer loopafstande met dieselfde beheerbenadering moontlik maak.
Impak en Volgende Stappe
Hierdie werk toon dat bekostigbare platforms steeds ’n belangrike rol in gevorderde robotikanavorsing kan speel. Deur te bewys dat ’n relatief eenvoudige robot stabiel kan loop, bied hierdie tesis ’n grondslag vir verdere navorsing wat andersins beperk sou wees tot goed befondsde laboratoriums.
Die volgende stappe vir Q-Bert sluit in:
- Opgradering na ingeboude krag en rekenaarstelsels vir groter outonomie
- Verfyning van die loopgang om voetvryhoogte en stabiliteit te verbeter
- Toetsing van die robot op meer uitdagende terrein
- Verkenning van gevorderde bewegings soos draf of hardloop
Deur hierdie uitdagings aan te pak, kan Q-Bert ontwikkel van ’n loopprototipe tot ’n veelsydige navorsingsplatform wat verskeie bewegingsstrategieë kan toets.
Verwante stories

Ingenieurswese en tegnologie
’n Slimmer Manier om Huisenergie Tydens Beurtkrag te Bestuur
Vir baie Suid-Afrikaanse huishoudings met sonpanele en batterye lê die moeilike deel nie by die installasie van die hardeware nie. Die moeiliker deel is om te...
Ingenieurswese en tegnologie
Wanneer Mobiele Netwerke Misluk, Kan ’n Foon Jou Groep Steeds Bereik
By ’n konsert, sportbyeenkoms of buiteluggeleentheid neem mense dikwels aan dat hul fone sal werk wanneer hulle dit nodig kry. In die praktyk kan dit vinnig...

Ingenieurswese en tegnologie
Ingenieurswese Opedag in ’n heringerigte spasie
Grys wolke en ’n donderstorm het min impak gehad om voornemende studente en hulle gesinne te ontmoedig om die 2026-weergawe van die Fakulteit Ingenieurswese se...