Van Simulasie na Werklikheid: Evaluering van die Doeltreffendheid van Pure Pursuit, MPC en MPCC op die F1Tenth-platform
- Hierdie studie ondersoek hoe drie outonome voertuigbeheer-algoritmes (Pure Pursuit, MPC en MPCC) presteer wanneer hulle van simulasie na die werklike wêreld oorgedra word.
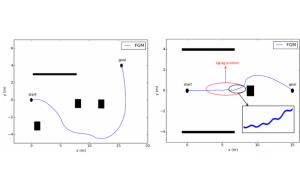
- Hoewel MPCC die beste in simulasie gevaar het, het werklike toetse gewys dat lokaliseringsfoute, sensor-geraas en vertragings groot uitdagings veroorsaak. MPC kon egter suksesvol aangepas word met tegnieke soos Kalman-filtrering en vertragingskompensasie, terwyl MPCC weens hardeware-beperkings nie effektief kon funksioneer nie.
- Die kerninsig is dat die oorbrugging van die sim-tot-werklikheid-gaping nie net oor gevorderde algoritmes gaan nie, maar ook oor betroubare sensors, akkurate data en voldoende rekenaarkrag.
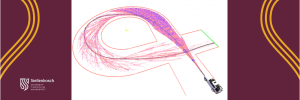
Simulasie dien as die primêre toetsgrond waar outonome algoritmes vorm aanneem. Tog bestaan daar ’n beduidende gaping tussen ’n perfekte digitale omgewing en die fisiese wette van die werklikheid, ’n verskynsel bekend as die “sim-tot-werklikheid”-gaping.
Hierdie ingenieursuitdaging vorm die kern van Xiangyiming Kong se navorsing, wat die F1Tenth-renplatform gebruik het om die grense van moderne beheer-algoritmes te toets.
Die deelnemers: Drie benaderings tot beheer
Die studie het drie verskillende beheer-algoritmes ondersoek, gekies vir hul verskillende vlakke van berekeningskompleksiteit en teoretiese verfyning:
Pure Pursuit:
Die eenvoudigste van die drie. Hierdie geometriese baanvolg-algoritme bereken ’n stuurhoek gebaseer op ’n “teikenpunt” op ’n vaste afstand voor die voertuig. Dit bly berekeningsdoeltreffend en stabiel, en funksioneer soortgelyk aan ’n bestuurder wat ’n paar meter vorentoe kyk om die stuur aan te pas.
Model Predictive Control (MPC):
’n Meer gesofistikeerde, optimaliseringsgebaseerde algoritme. MPC gebruik ’n dinamiese model van die voertuig om toekomstige toestande oor ’n beperkte tydhorison te voorspel. Dit los by elke tydstap ’n optimaliseringsprobleem op om baanfoute en beheerpoging te minimaliseer, en beplan dus vooruit om veiligheid en doeltreffendheid te balanseer.
Model Predictive Contouring Control (MPCC):
Die mees komplekse van die drie. Anders as standaard MPC, wat streng ’n voorafbepaalde pad volg, kombineer MPCC voorspellende modellering met kontourdoelwitte. Dit balanseer die kompromie tussen padakkuraatheid en vordering, en laat die voertuig toe om effens van die middel van die baan af te wyk indien dit hoër spoed deur draaie moontlik maak—soos ’n professionele renjaer wat die vinnigste lyn vind.
Verwante stories

Ingenieurswese en tegnologie
’n Slimmer Manier om Huisenergie Tydens Beurtkrag te Bestuur
Vir baie Suid-Afrikaanse huishoudings met sonpanele en batterye lê die moeilike deel nie by die installasie van die hardeware nie. Die moeiliker deel is om te...
Ingenieurswese en tegnologie
Wanneer Mobiele Netwerke Misluk, Kan ’n Foon Jou Groep Steeds Bereik
By ’n konsert, sportbyeenkoms of buiteluggeleentheid neem mense dikwels aan dat hul fone sal werk wanneer hulle dit nodig kry. In die praktyk kan dit vinnig...

Ingenieurswese en tegnologie
Ingenieurswese Opedag in ’n heringerigte spasie
Grys wolke en ’n donderstorm het min impak gehad om voornemende studente en hulle gesinne te ontmoedig om die 2026-weergawe van die Fakulteit Ingenieurswese se...