From Simulation to Reality: Assessing the Efficacy of Pure Pursuit, MPC, and MPCC on the F1Tenth Platform
- This research investigates how three autonomous vehicle control algorithms (Pure Pursuit, MPC, and MPCC) perform when moving from simulation to real-world testing on the F1Tenth platform.
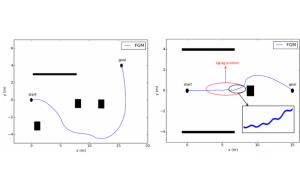
- While MPCC performed best in simulation, real-world testing revealed that localisation errors, sensor noise, delays, and hardware limits significantly impacted performance. MPC was successfully adapted using filtering and delay compensation, while MPCC failed due to computational constraints.
- The key takeaway: bridging the sim-to-real gap requires more than good algorithms, it depends on reliable sensors, accurate localisation, and sufficient processing power.
From Simulation to Reality: Assessing the Efficacy of Pure Pursuit, MPC, and MPCC on the F1Tenth Platform
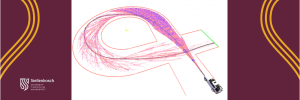
Simulation serves as the primary proving ground where autonomous algorithms take shape. Yet, a significant disconnect exists between a perfect digital environment and the physical laws of reality, a phenomenon known as the “sim-to-real” gap.
This engineering challenge forms the core of Xiangyiming Kong’s research, which utilised the F1Tenth racing platform to test the limits of modern control algorithms.
The Contenders: Three Approaches to Control
The study examined three distinct control algorithms, selected for their varying levels of computational complexity and theoretical sophistication:
- Pure Pursuit: The simplest of the three, this geometric path-tracking algorithm calculates a steering angle based on a “pursuit point” at a fixed distance ahead of the vehicle. It remains computationally efficient and stable, functioning much like a driver looking a few meters down the road to adjust the steering wheel.
- Model Predictive Control (MPC): A more sophisticated optimization-based algorithm. MPC uses a dynamic model of the vehicle to predict future states over a finite horizon. It solves an optimization problem at every time step to minimize tracking errors and control effort, effectively planning ahead to balance safety and efficiency.
Model Predictive Contouring Control (MPCC): The most complex of the trio. Unlike standard MPC, which strictly follows a pre-determined path, MPCC combines predictive modeling with contouring objectives. It balances the trade-off between path accuracy and progress, allowing the vehicle to deviate slightly from the centerline if it means carrying more speed through a corner, mimicking the behavior of a professional racing driver finding the fastest line.
Related stories

Engineering and technology
A Smarter Way To Manage Home Energy During Load-Shedding
For many South African households with solar panels and batteries, the hard part isn’t installing the hardware. The harder part is deciding when to charge the...
Engineering and technology
When Mobile Networks Fail, A Phone Can Still Reach Your Group
At a concert, sports event, or outdoor gathering, people often assume their phones will work when they need them. In practice, that can fall apart fast. If too...

Engineering and technology
Engineering Open Day returns to a reimagined space
Grey skies and a passing thunderstorm did little to deter prospective students and their families from attending the Faculty of Engineering’s 2026 Open Day on...