
Die Ontwikkeling en Beheer van ’n Outonome Seilboot
- Hierdie navorsing ontwikkel ’n outonome seilboot wat windkrag gebruik om vir lang tye op see te funksioneer sonder menslike ingryping. Deur ’n digitale tweeling en ’n intelligente beheerstelsel te kombineer, kan die boot self navigeer en komplekse maneuvers uitvoer. Die projek bied ’n bekostigbare, oopbron-oplossing met bewese resultate en potensiaal vir verdere verbetering.
As jy die oseaan wil verken, staar jy twee aanhoudende probleme in die gesig: dit is gevaarlik, en dit is enorm. Mense het rus nodig, en konvensionele bote benodig brandstof. Skroefgedrewe outonome voertuie is ’n goeie begin, maar hul beperkte batteryvermoë beperk hul reikwydte. Hierdie realiteit dryf navorsers na outonome seilbote. ’n Seilboot, aangedryf deur die wind, kan vir maande op see bly om weer te monitor, navorsing te doen, of gevaarlike gebiede te verken waar mense nie kan gaan nie.
Om ’n seilboot self te laat stuur, is egter uiters moeilik. Die veld is nog in ’n vroeë stadium. Navorsing deur Ruben van Tonder, onder leiding van Professore Jaco Versfeld en Japie Engelbrecht, pak hierdie uitdaging direk aan. Dit bied ’n praktiese, oopbron-bloudruk om ’n gewone seilboot in ’n slim, outonome vaartuig te omskep.
Hoekom hierdie boot?
Jy kan nie ’n beheerstelsel in isolasie ontwerp nie — jy het ’n boot nodig. Baie vorige navorsingsprojekte het hul eie pasgemaakte seilbote gebou of groot, duur modelle gebruik. Hierdie benadering maak dit moeilik om die navorsing te herhaal.
Van Tonder het ’n ander pad gekies. Hy het die Dragonflite 95 gekies, ’n gewilde, kommersieel beskikbare afstandbeheerde resies-seilboot. Hierdie keuse is sentraal tot die projek. Die boot is toeganklik en bekostigbaar. Deur ’n stelsel vir hierdie boot te bou, word die navorsing onmiddellik bruikbaar vir ’n breër gemeenskap van stokperdjielinge, studente en ander navorsers.
Hoe dit werk
Deel 1: Die Digitale Tweeling
Jy toets nie nuwe outopilot-kode deur eenvoudig die boot in die water te sit nie. Die eerste en mees veeleisende stap was om ’n “digitale tweeling” te bou — ’n gedetailleerde simulasie van die Dragonflite 95. Dit is ’n komplekse wiskundige model gebaseer op fisika:
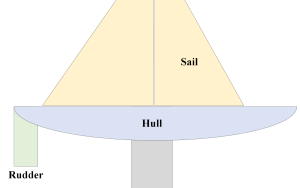
- Hidrodinamika: Hoe water rondom die romp, kiel en roer beweeg
- Hidrostatika: Hoe die boot in die water sit en balanseer
- Aerodinamika: Hoe die wind die seil tref om krag te genereer
Die tesis beskryf die modelle vir die kragte wat op die seil, kiel, roer en romp inwerk. Om die parameters korrek te kry, het Van Tonder ’n kombinasie van numeriese skattings en praktiese toetse gebruik. Byvoorbeeld, hy het die werklike boot fisies gekantel en sy “rol-afname” gemeet — hoe dit terugkeer na ’n stabiele posisie — om data vir die simulasie te verkry.
Die finale simulasie is ’n model met vier vryheidsgrade:
- Surge (vorentoe/agtertoe)
- Sway (sywaarts)
- Roll (kanteling)
- Yaw (draai)
Dit ignoreer heave (op/af beweging) en pitch (voor/agter kanteling), aangesien hierdie bewegings minder belangrik is vir hierdie tipe seil.
Voordat hy verder gegaan het, moes hy bewys dat die simulasie akkuraat is. Hy het toetse op die werklike boot uitgevoer, soos:
- “Rudder step”-toetse (hoe vinnig draai dit?)
- “Surge dynamic”-toetse (hoe vinnig vertraag dit?)
Die simulasie se resultate het nou ooreengestem met die praktiese toetse. Hy het nou ’n veilige en betroubare digitale toetsomgewing gehad om die boot se “brein” te ontwikkel.
Verwante stories

Ingenieurswese en tegnologie
’n Slimmer Manier om Huisenergie Tydens Beurtkrag te Bestuur
Vir baie Suid-Afrikaanse huishoudings met sonpanele en batterye lê die moeilike deel nie by die installasie van die hardeware nie. Die moeiliker deel is om te...
Ingenieurswese en tegnologie
Wanneer Mobiele Netwerke Misluk, Kan ’n Foon Jou Groep Steeds Bereik
By ’n konsert, sportbyeenkoms of buiteluggeleentheid neem mense dikwels aan dat hul fone sal werk wanneer hulle dit nodig kry. In die praktyk kan dit vinnig...

Ingenieurswese en tegnologie
Ingenieurswese Opedag in ’n heringerigte spasie
Grys wolke en ’n donderstorm het min impak gehad om voornemende studente en hulle gesinne te ontmoedig om die 2026-weergawe van die Fakulteit Ingenieurswese se...