
The Development and Control of an Autonomous Sailboat
- This blog explores the development of an autonomous sailboat designed to navigate and operate independently over long distances using wind power. The research presents a practical, open-source approach by converting a commercially available sailboat into a smart vessel through a combination of physics-based simulation and advanced control systems. By creating a validated digital twin and integrating motion and guidance controls, the project demonstrates reliable autonomous navigation, including complex maneuvers like tacking. The work lays a strong foundation for future improvements in hardware and software, advancing the potential of low-cost, long-range ocean monitoring and exploration.
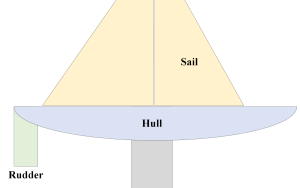
If you want to explore the ocean, you face two persistent problems: it’s dangerous, and it’s huge. Humans need rest, and conventional boats need fuel. Propeller-driven autonomous vehicles are a good start, but their limited battery capacity limits their range. This reality is pushing researchers toward autonomous sailboats. A sailboat, powered by the wind, can patrol the seas for months, monitoring weather, conducting research, or exploring areas too hazardous for a human crew. Making a sailboat steer itself is extremely difficult. The field is still in its early stages. However, research by Ruben van Tonder under supervision of Professors Jaco Versfeld and Japie Engelbrecht, confronts this challenge directly. It provides a practical, open-source blueprint for turning a common sailboat into a smart, autonomous vessel. Why This Boat? You can't design a control system in a vacuum. You need a boat. Many past research projects built their own custom sailboats or used large, expensive models. This approach makes the research difficult to replicate. Van Tonder took a different path. He chose the Dragonflite 95, a popular, commercially available remote-controlled racing sailboat. This choice is at the heart of the project. The boat is accessible and affordable. By building a system for this boat, the research becomes immediately useful to a wide community of hobbyists, students, and other researchers. How It Works The first major problem was that no public simulation model existed for the Dragonflite 95. Before you can teach a boat to sail, you must first build a digital version of that boat. Part 1: The Digital Twin You don't test new autopilot code by just putting your boat in the water. The first and most demanding step was to build a “digital twin”, a detailed simulation model of the Dragonflite 95. It is a complex mathematical model built on physics: Hydrodynamics: How water moves around the hull, keel, and rudder. Hydrostatics: How the boat sits and balances in the water. Aerodynamics: How the wind hits the sail to generate force. The thesis details the models for the forces acting on the sail, keel, rudder, and hull. To get the parameters right, Van Tonder used a mix of numerical estimates and practical tests. For example, he physically tilted the real boat and measured its “roll decay”, how it rocks back to a stable position, to obtain data for the simulation. The final simulation is a 4-degree-of-freedom model. It focuses on surge (forward/back), sway (side-to-side), roll (tilting), and yaw (turning). It ignores heave (up/down) and pitch (front/back tilting), as those motions are less important for this type of sailing. Before moving on, he had to prove the simulation was accurate. He performed tests on the physical boat, like “rudder step” tests (how fast does it turn?) and “surge dynamic” tests (how fast does it slow down?). The simulation's results closely matched the practical tests. He now had a safe, reliable digital sandbox to build the boat's brain.
Related stories

Engineering and technology
A Smarter Way To Manage Home Energy During Load-Shedding
For many South African households with solar panels and batteries, the hard part isn’t installing the hardware. The harder part is deciding when to charge the...
Engineering and technology
When Mobile Networks Fail, A Phone Can Still Reach Your Group
At a concert, sports event, or outdoor gathering, people often assume their phones will work when they need them. In practice, that can fall apart fast. If too...

Engineering and technology
Engineering Open Day returns to a reimagined space
Grey skies and a passing thunderstorm did little to deter prospective students and their families from attending the Faculty of Engineering’s 2026 Open Day on...